pick up
product
Virtual Space Simulation
"WARXSS®"
Traffic crashes, urban planning, and automated driving challenges can be reproduced, compared, and validated in 3D. This “visual evidence” accelerates the implementation of the transportation systems of the future.
In recent years, virtual space techniques such as VR and AR have evolved rapidly, delivering innovative solutions not only for entertainment but also for education and business..
WARXSS ® is a simulation tool that applies this virtual space technique to solving traffic problems.Reproducing existing cities in a 3D space, visualizing risks/measures that are not transmitted by drawings or photographs alone.Supporting smooth decision-making and consensus formation among the parties involved, we will lead various projects to the results, from traffic accident countermeasures to social implementation of automated driving.

Issues in Transportation Planning
Differences in stakeholder perceptions can lead to project delays and increased costs.Visualization of WARXSS ® makes it possible to share information that is hard to convey with conventional drawings and photographs by visualizing it clearly.
Specific issues Anticipated On‑Site
Traffic Safety Measures
-
Risks and the effectiveness of countermeasures are difficult to communicate to stakeholders using drawings or photos alone.
-
Comparison of draft measures stays in the "standard method" and qualitative discussion, and the objective ground cannot be shown.
-
It takes time to form an agreement with the police and local residents, and the plan does not proceed smoothly.
Urban Planning & Redevelopment
-
It is difficult to spatially share changes in traffic volume and human flow after redevelopment among the parties concerned.
-
In the inhabitant explanatory meeting based on the plan view, it is difficult to obtain the understanding from the image gap to the plan after the completion.
-
It tends to be insufficient to examine from multiple viewpoints such as the effect on the landscape.
Automated Driving & Special-Purpose Vehicles
-
The concrete image of running does not spring, and the introduction plan stagnates.
-
The anxiety to safety cannot be dispelled, and it is difficult to develop the understanding (social acceptability) of inhabitants and businesses.
-
Verification in meteorological conditions and dangerous scenes, which are difficult to reproduce in reality, takes enormous time and cost.

What is WARXSS ®?
This is a simulator developed jointly by RYODEN and Witz to support "Discussion" and "Agreement Formation" in the transportation and urban planning field.The high-quality virtual enviroment that utilizes Unreal Engine makes it possible to verify even under conditions that are difficult to reproduce in reality.Unlike expert development simulators, this emphasis is placed on promoting understanding among the parties involved.
Unlike the costly and specialized simulators used in automotive engineering, WARXSS® specializes in sharing images and revitalizing discussions among stakeholders.
Demonstration video & visual examples
Multi-perspective
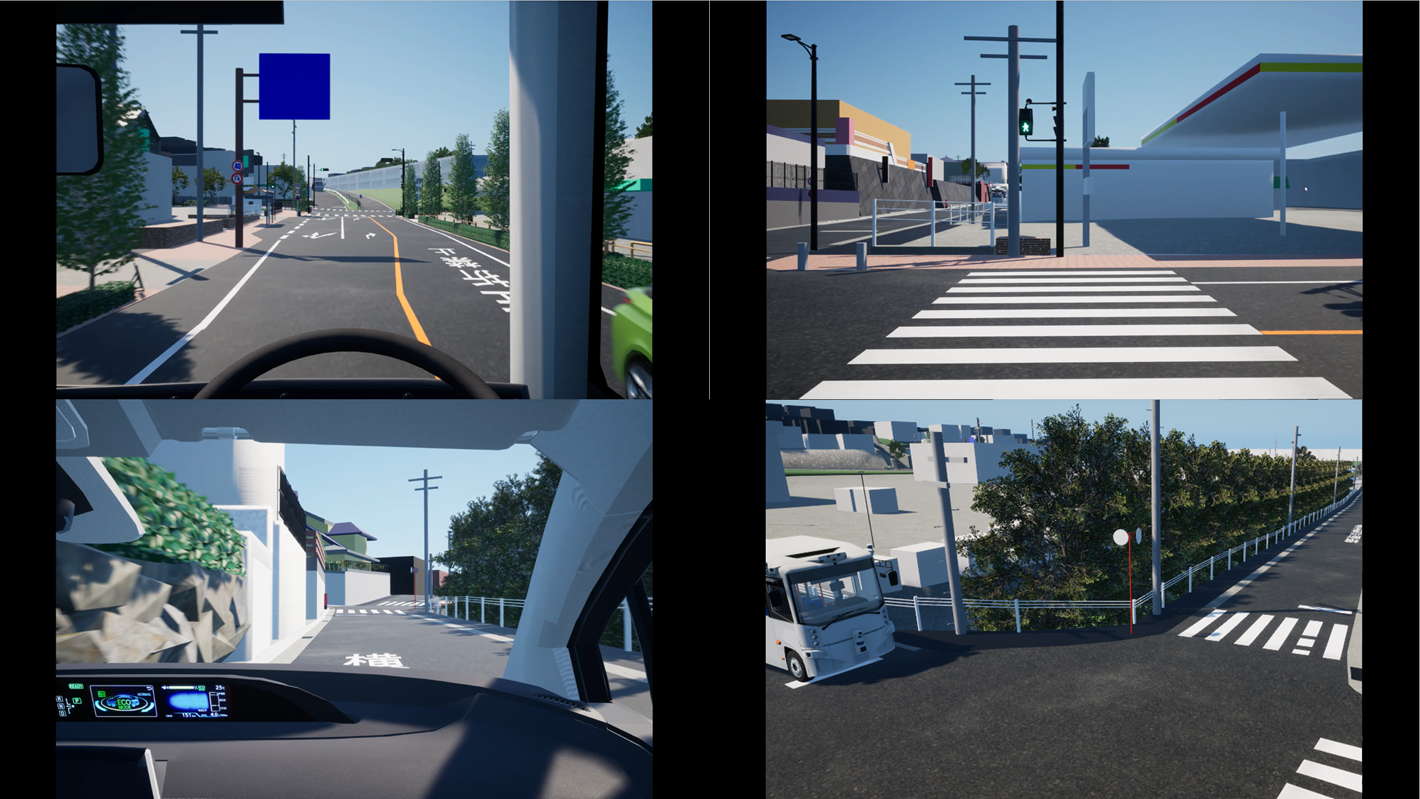
Comparison movie with multiple-view switching
Driver's perspective
Pedestrian's perspective
Comparison of Development Simulators and WARXSS®
|
|
Simulator for development |
WARXSS® |
|---|---|---|
|
Main purpose
|
Quantitative development and verification |
Image sharing, discussion, and consensus building |
|
Price range
|
Expensive |
Low cost |
|
Introduction period
|
Long‑term |
Short-term (approx. 1 month to) |
|
Operability
|
Require advanced expertise |
No expertise required and intuitive |
|
Form of provision
|
Packaged products |
Flexible customization |
Feature: Flexible customizability. We are able to propose optimal system configuration utilizing our current assets. We are also strong in building I/F with other companies' tools.
Main functions and technologies
|
Category
|
Main technologies and functions |
|---|---|
|
Location model
|
Including roads, highways, test-courses, parking lots, and imports from OpenStreetMap |
|
Weather and environmental conditions
|
Reproduce the passage of time with changes in sunny, light rain, heavy rain, snowfall, snow accumulation, and the position of the sun, etc. |
|
3D object-object
|
Import of customer-owned CAD data. Appearance reproduction of vehicles and buildings. Simple obstacle layout, etc. |
|
Sensor model
|
Simulate the behavior of LiDAR, millimeter-wave radar, cameras, IMU, and other sensors |
|
I/F of collaboration with other companies
|
MATLAB/Simulink, Windows apps, Synopsys tooling and Vissim, ROS |
Use case applying WARXSS ® technique
Simulation dramatically increases the accuracy and convincing of your plan.
Originally, WARXSS ® centers on the issues of autonomous driving and urban transportation. By applying virtual space simulation technology and combining it with Witz's technology, it can contribute to solving problems in a variety of peripheral areas.
1. Automatic operation system verification
Safety verification required for automatic operation can be performed efficiently.Bad weather, nighttime, and dangerous scenes, which are difficult to reproduce in reality, can be simulated on a virtual environment and repeatedly verified.The system also supports feedback verification in cooperation with the target system, enabling comprehensive evaluation of a wide range of situations.This improves the accuracy of verification at the development site and contributes to the efficiency of the entire process.
2. MaaS Business and Urban Development
In MaaS projects and urban planning that combine public transportation with automated driving vehicles, congestion can be predicted through cooperation with traffic flow simulators.You can also compare the layout pattern of bus stops and pedestrian crossings and simulate landscape changes.It is also possible to intuitively present the image after completion in the resident's description, and support the compatibility of convenience and safety.
By utilizing PLATEAU data together with a traffic flow simulator, it becomes possible to reproduce and analyze traffic environments that closely resemble those of real cities.
3. Traffic accident countermeasures
We can analyze the causes of accidents in a diverse manner by reproducing hazardous behavior, compare Before/After of proposed measures, and visualize stopping distances according to vehicle speeds.We will promote the smooth formation of consensus as a "visible ground" that is easy for anyone to understand in the explanation to the police and inhabitants.
Collaboration with meteorological and road data enables more empirical accident reproduction.
4. Special‑Purpose vehicles (Agriculture, Construction and Factories)
In fields such as agriculture, construction, and factories, the working environment and operating conditions are greatly different from those of general transportation.WARXSS ® can also be used to verify special-purpose vehicles by applying the system developed in the transportation and urban planning areas, which reproduces the enviroment and shares it among the parties involved.
Case example
Safety verification of autonomous service vehicles
Training for automatic operation crew and human resources
Most autonomous driving service vehicles will be introduced starting at "Level 2" (where a human driver must be ready to take control), with the ultimate goal of achieving "Level 4" (fully driverless operation). Therefore, during the transition to full autonomy, onboard operators will be required to understand the capabilities and limitations of the autonomous driving system.
WARXSS®, through its VR perspective, can be utilized as a training tool that allows operators to visualize the vehicle's operations in advance.
This enables intuitive and effective training for operators from diverse backgrounds—from new recruits with limited driving experience to veteran drivers accustomed to conventional buses—and helps establish a safe and smooth operational framework.

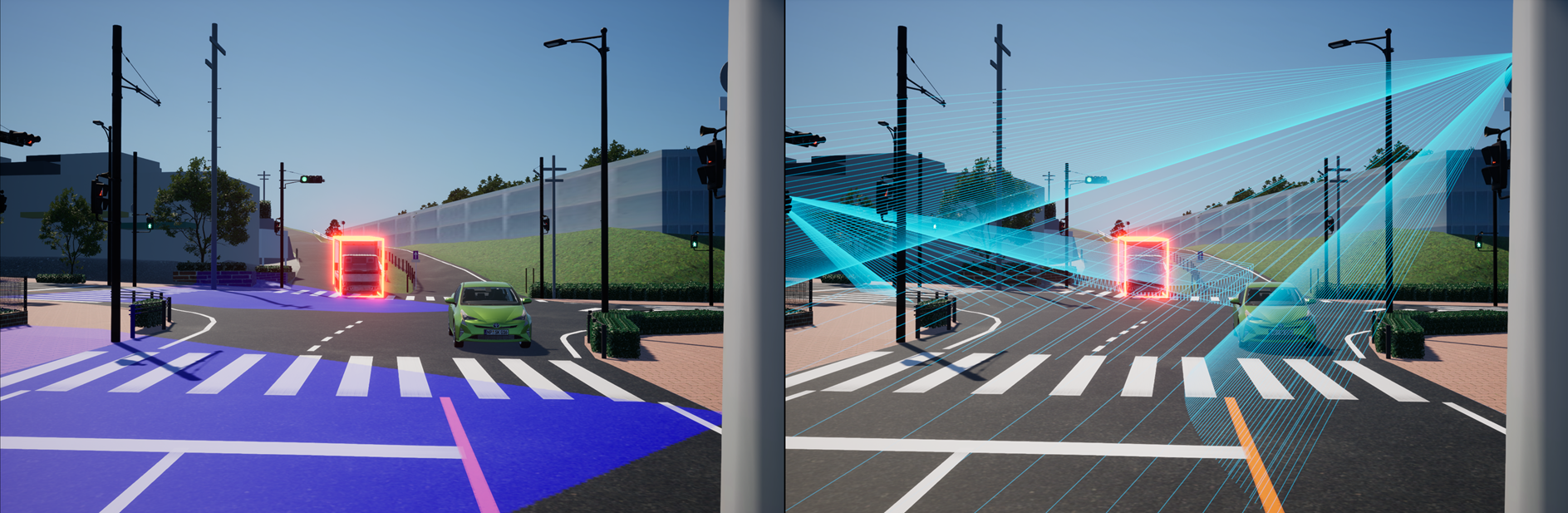
Sensor visibility region simulation
The detection area and blind spots of LiDAR, cameras, and radars are displayed in 3D.Pedestrians and vehicles detected by the sensors are highlighted and the detection status can be confirmed intuitively.
Utilized in an advanced national project aimed at promoting the widespread adoption of unmanned autonomous driving services.
Commissioned by the Japan Automobile Research Institute (JARI), a participant in the "RoAD to the L4" project, WARXSS® is being used for the training and consensus building of operators for autonomous buses in the Hitachi BRT (Theme 2) and Kashiwanoha (Theme 4) areas.
Regional development in cooperation with construction consultants
In cooperation with Fukuyama Consultant Co., Ltd., we provide local governments with a range of services, from automatic driving introduction plans to route setting, risk assessment, and verification support.
Support social implementation of traffic and urban planning and automated driving through objective verification through simulations.
